This website uses cookies that store information about your usage of the page. By continuing to use this page you confirm you are happy with that.
Review and change how cookies are used.
Our research in the areas of artificial intelligence, robotics and artificial life as well as in assistive and rehabilitation robotics has been conducted in various national and international research projects. Many of the projects have been supported by and realised in our long-term focus areas.
Website
09/2019 - 08/2022
Robotics: Dr Ben Robins (PI), Robotics: Dr Luke Wood, Robotics: Dr Gabriella Lakatos, Robotics: Dr Patrick Holthaus
EMBOA project (Affective loop in Socially Assistive Robotics as an intervention tool for children with autism) aims at the development of guidelines and practical evaluation of applying emotion recognition technologies in robot-supported intervention in children with autism. Children with autism spectrum disorder (ASD) suffer from multiple deficits, and limited social and emotional skills are among those, that influence their ability to involve in interaction and communication.
Website
02/2022 - 07/2022
Robotics: Prof. Farshid Amirabdollahian (PI), Robotics: Dr Ben Robins, Robotics: Dr Luke Wood, Robotics: Dr Gabriella Lakatos
Whilst a vast amount of research has investigated communication interventions and their impact on children with Speech Language and Communication Needs (SLCN), the possibility of using state of the art robotics technology, specifically focused on SLC therapies has had very little investigation. This research will be a pioneering study, using the humanoid robot Kaspar as a therapeutic tool for children with learning disabilities in need of SLC therapies to investigate how robotic technology could help these children.

Website
07/2021 - 06/2022
Robotics: Prof. Farshid Amirabdollahian (PI), Robotics: Dr Ben Robins, Robotics: Dr Patrick Holthaus, Robotics: Dr Gabriella Lakatos, Robotics: Dr Luke Wood
Robotics: Dr Marina Sarda Gou
Kings College London (Mohammad Mousavi, Hana Chockler), Garston Manor School, Compusult
The project focuses on identifying how causal explanation can influence trust in an educational robotic platform, the Kaspar robot. We hypothesise that a robot’s ability to explain its educational actions would make it a more trustworthy educational tool, for the pupils, their parents and their teachers. This may in turn make the robot-mediation more successful.
Website
03/2019 - 03/2022
Robotics: Prof. Farshid Amirabdollahian, Robotics: Dr Kheng Lee Koay (supervisor), Robotics: Dr Catherine Menon (supervisor)
Dr Ataollah Ramezan Shirazi (associate)
This is a KTP application for joint-development of a cucumber harvest robot for harvesting cucucmber grown in a greenhouse.

Website
03/2017 - 03/2019
Prof. Kerstin Dautenhahn (PI), Robotics: Prof. Farshid Amirabdollahian (PI), John Senior, Michael L Walters, Robotics: Dr Kheng Lee Koay
Robotics: Dr Patrick Holthaus
The goal of this proposal was to seek funding to extend the functionalities of the robotics hardware in the University of Hertfordshire's (UH) Robot House (RH), creating the Robot House 2.0 - and, importantly, to make it accessible to other research groups. RH2.0 was to become an easily accessible hub for UK universities and industry conducting research into smart home and robotics technology.

Website
02/2019 - 06/2019
Robotics: Dr Catherine Menon (PI), Robotics: Dr Patrick Holthaus
The SocCred (Assuring safety and social credibility) project was a small feasibility project to identify and characterise the link between social credibility and safety, funded by the AAIP (Assuring Autonomy International Programme). An interactive experiment indicated that users are more likely to accept the safety assessment of a robot that they consider socially intelligent instead of one lacking social competency, which users considered necessary to cross-check these against their own experience.
Website
02/2011 - 01/2015
Prof. Daniel Polani (PI)
Dr Christoph Salge, Dr Nicola Catenacci-Volpi
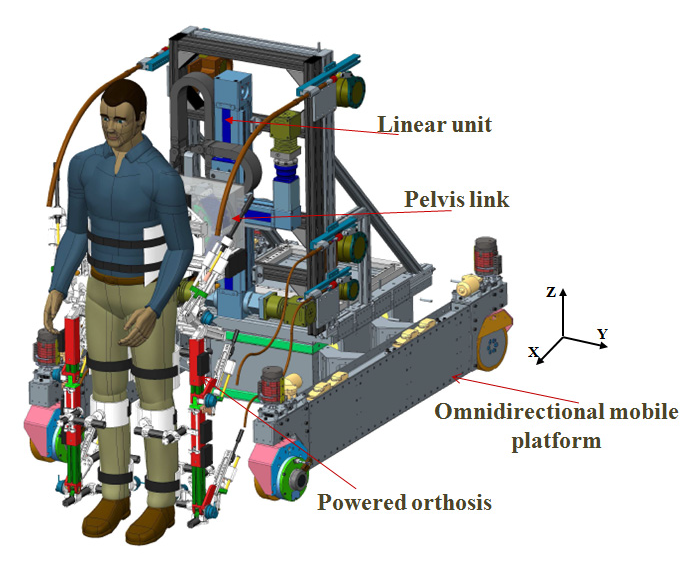
The focus of the CORBYS project is on robotic systems that have symbiotic relationship with humans. These systems have to cope with highly dynamic environments as humans are demanding, curious and often act unpredictably. CORBYS will design and implement a cognitive robot control architecture that allows the integration of 1) high-level cognitive control modules, 2) a semantically-driven self-awareness module, and 3) a cognitive framework for anticipation of, and synergy with, human behaviour. These modules will be supported with an advanced multi-sensor system to facilitate dynamic environment perception. This will enable the adaptation of robot behaviour to the user’s variable requirements.